第1节 小绿的一小步,我们的一大步
小绿通过移动电源即可供电。接通电源后,访问小绿的ip地址,试着让小绿迈出第一步吧
原理图
小绿->手机浏览器: 1.建立局域网服务器
手机浏览器-->小绿: 2.通过WiFi访问控制界面
手机浏览器-->小绿: 3.发送请求给服务器,如“前进”
小绿->手机浏览器: 4.服务器响应请求,让小绿的动力系统执行
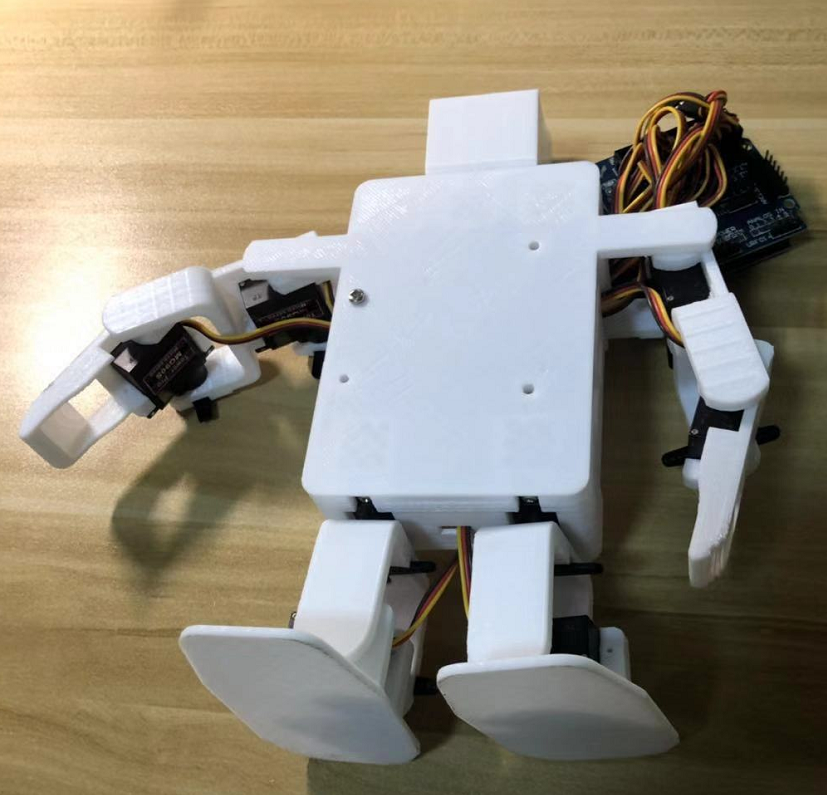
组装小绿
小绿的外壳是3D打印而成。将舵机固定在关节处。然后将舵机都接在主控板上就可以了。是不是很简单呢?
小绿的3D打印源文件在learn-ai/assets/3D Models/green
- 小绿共需要9个舵机,每个胳膊2个共4个,每条腿2个共4个,还有1个在颈部。
- 按顺序将舵机用螺丝刀固定在3D打印件上,完成组装。注意将舵机的线都引向中间。
烧录程序到开发板(选做)
程序烧录过程略,程序源文件见learn-ai/codes/chapter6/part2_FirstStep/greenrobot
小绿迈出第一步
1.将小绿连接到移动电源
2.查看ip地址
使用浏览器打开路由器管理地址,查找小绿的ip地址
3.访问测试地址
在浏览器中打开小绿ip地址/test

4.正确连接舵机
逐个将舵机的线连接到基于ESP8266芯片的Wemos D1开发板扩展板上。从0到11共12个槽位都可以。按照下面的对应关系将小绿的舵机连接到正确的槽位上,并进行测试。
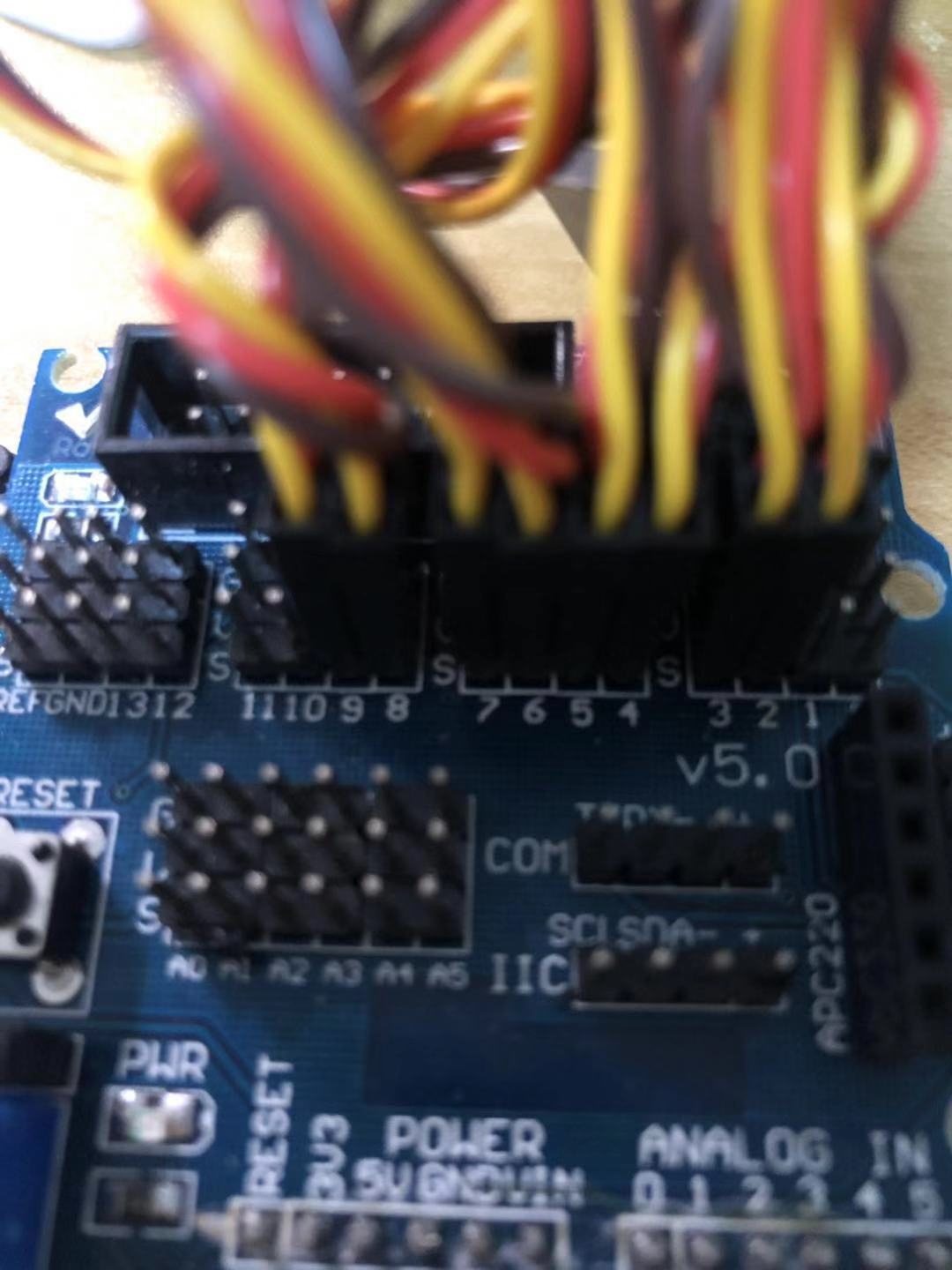
小绿的不同部位与槽位的对应关系如下:此面为正面
| 位置 | 槽位 | 位置 | 槽位 |
|---|---|---|---|
| 左手 | D5 | 右手 | D4 |
| 左脚 | D9 | 右肩 | D2 |
| 左腿 | D7 | 右腿 | D6 |
| 左肩 | D3 | 右脚 | D8 |
5.访问小绿ip地址
最后,终于可以让小绿迈出第一步了!

使用blockly积木控制小绿
打开learn-ai/codes/chapter6/part2_FirstStep/robot_diy_blockly/index.html,通过积木拖拽控制小绿
